


3-Minute Second Chance Quiz 2 Answers from Video Quiz Star 100% correct answers. Complete your quiz offer with 100% accuracy and get credited.
Quizzes are constantly updated. New questions are added and answers are changed. If you find any questions that are not present here or if your score was not 100% with the answers on our site, please let us know in the form before the comment section with the quiz link. We will update the answers as soon as we can.
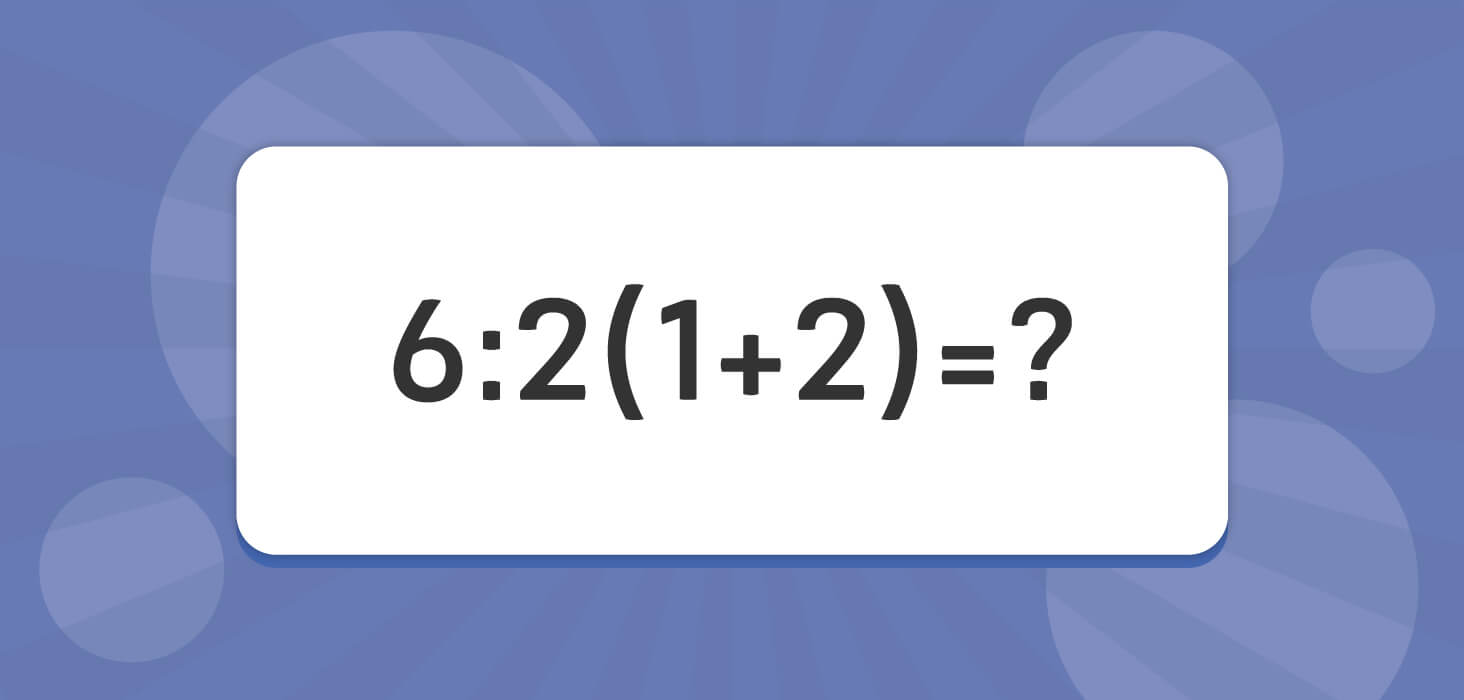
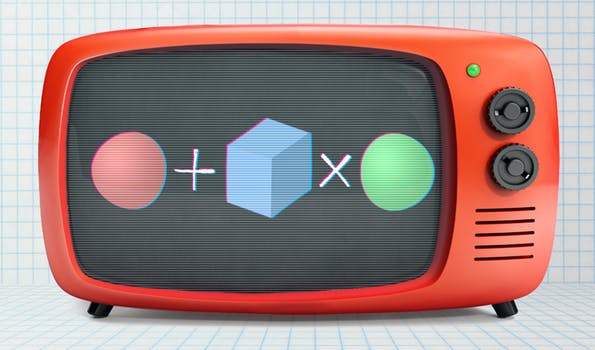
Q Alt 1. Let`s get started! Think you can work out this math problem?
Option:-
- 6
- 8
- 10
- 1
8




















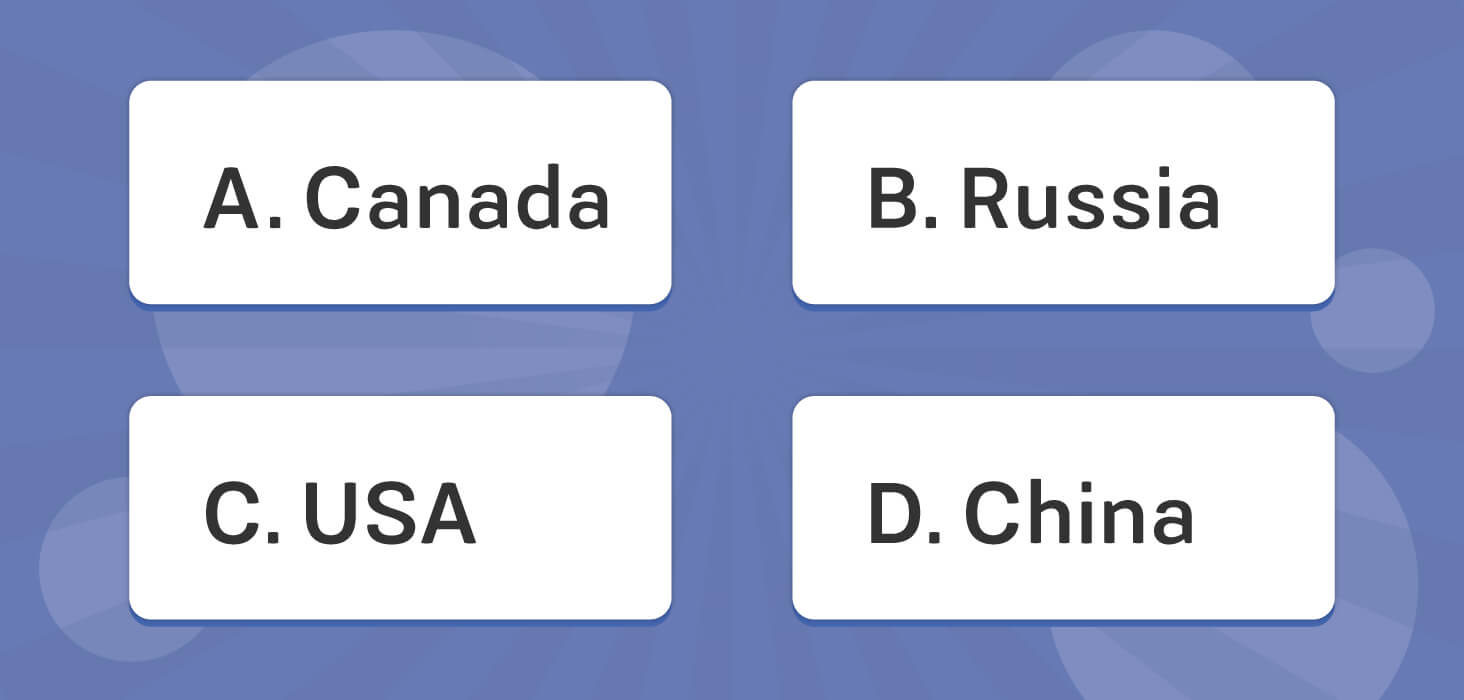
Q 3. Put these countries in order according to area, from largest to smallest (by area)!

Option:-
- BACD
- DACB
- CDAB
- BADC
CDAB
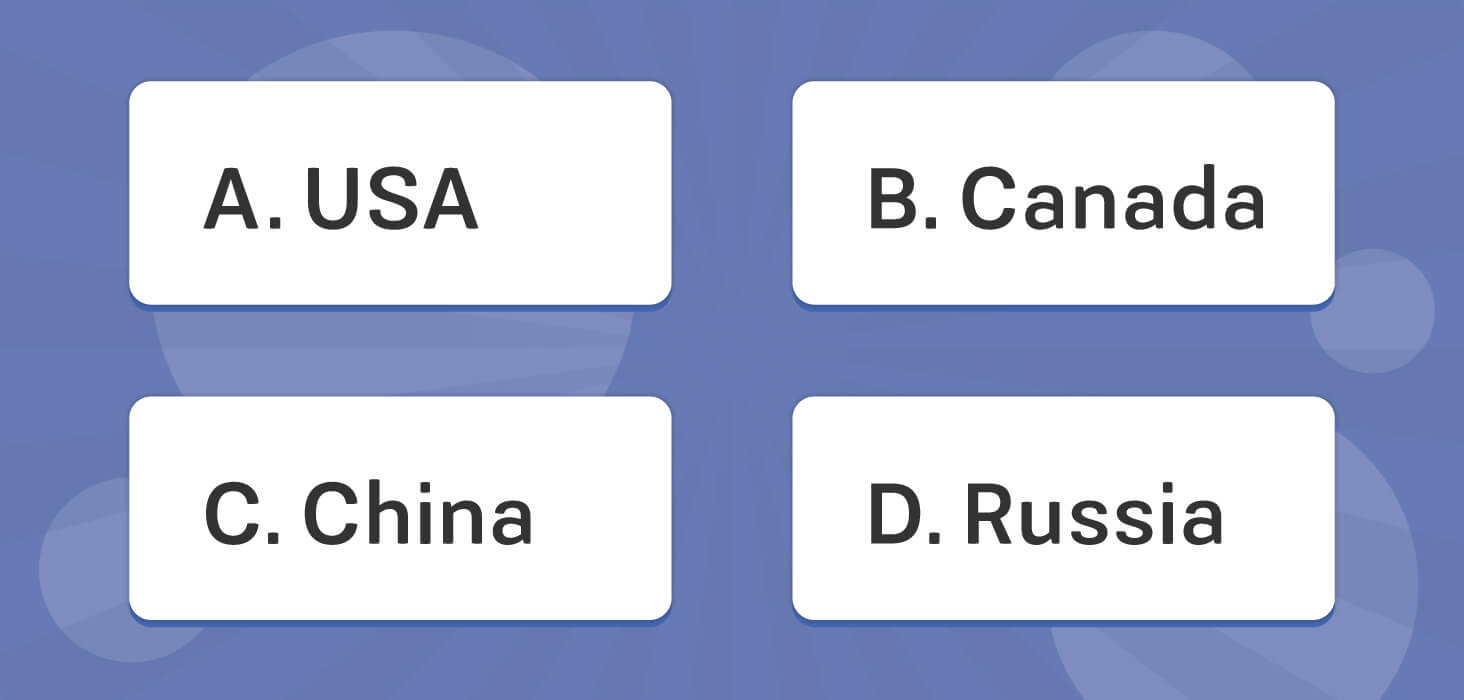
Q Alt 3. Put these countries in order according to area, from smallest to largest (by area)!
Option:-
- CDAB
- BDAC
- BADC
- BACD
BADC
Q Alt 3-2. Put these countries in order according to area, from largest to smallest (by area)!
Option:-
- BCDA
- CDAB
- BADC
- BACD
BADC
Q Alt 3-3. Put these countries in order according to area, from smallest to largest (by area)!
Option:-
- ADCB
- BADC
- CDAB
- DCAB
CDAB
Q Alt 3-4. Put these countries in order according to area, from largest to smallest (by area)!
Option:-
- DACB
- DABC
- BADC
- DBCA
DBCA
Q Alt 3-5. Put these countries in order according to area, from smallest to largest (by area)!
Option:-
- BCAD
- CBAD
- CDAB
- ACBD
ACBD
Q Alt 3-6. Put these countries in order according to area, from largest to smallest (by area)!

Option:-
- ACBD
- ADBC
- BADC
- ABCD
ACBD
Q Alt 3-7. Put these countries in order according to area, from smallest to largest (by area)!
Option:-
- DBCA
- CBDA
- CDAB
- DCBA
DBCA

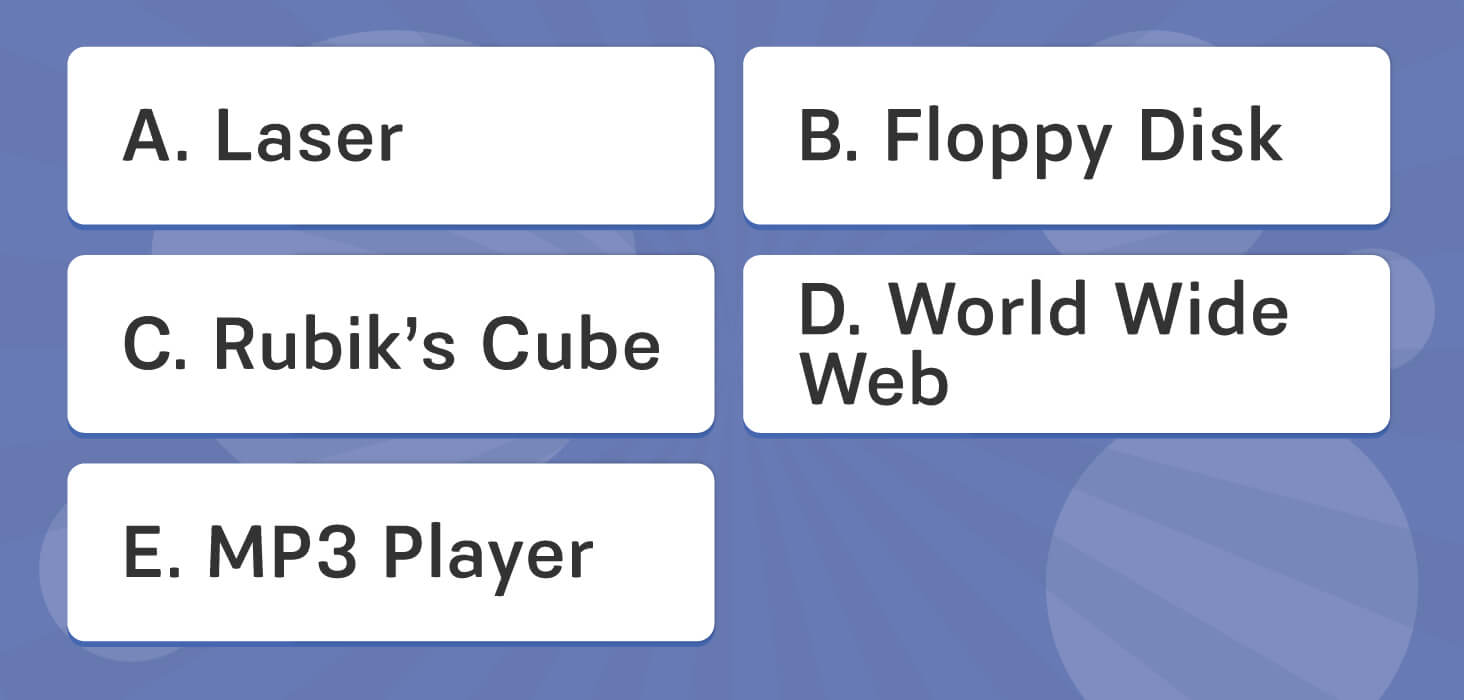
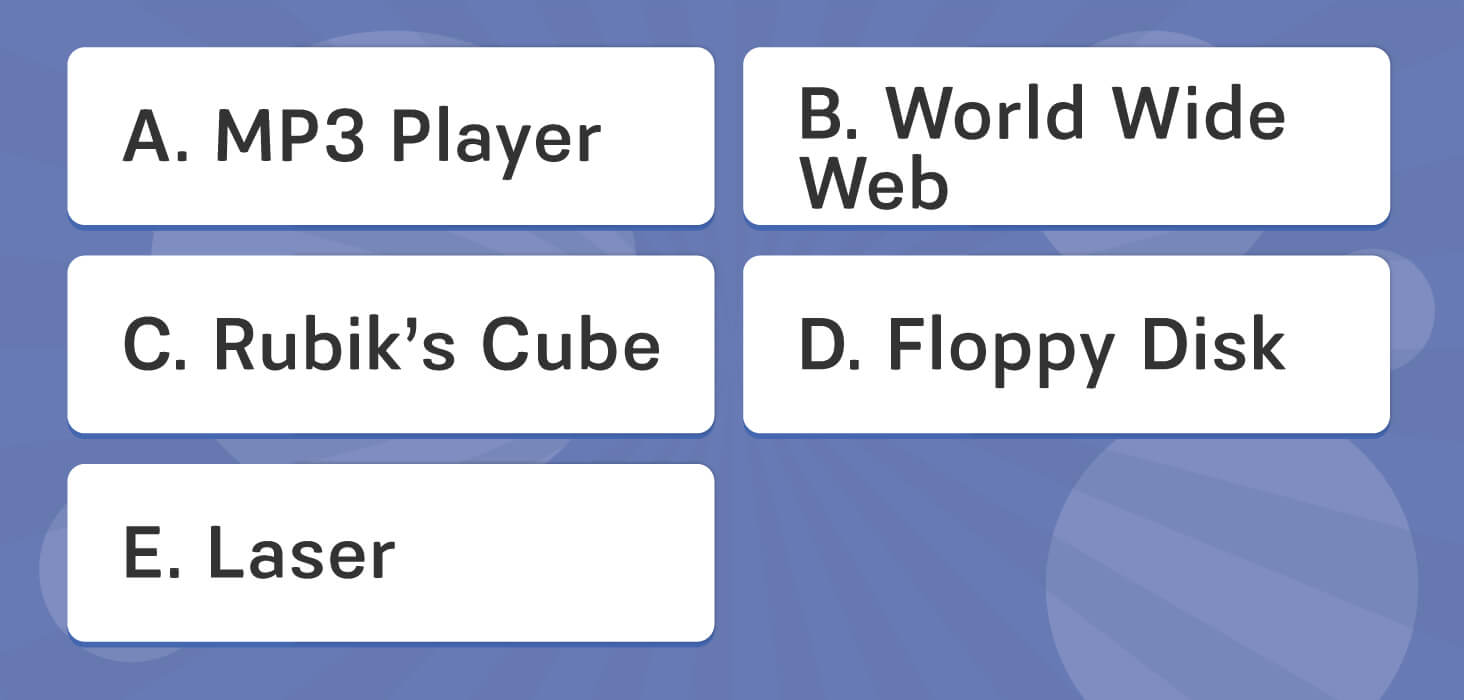
Q 5. See if you can put these inventions in the correct order, from most recent to oldest!

Option:-
- ACDBE
- CDEBA
- CADEB
- CAEDB
CAEDB
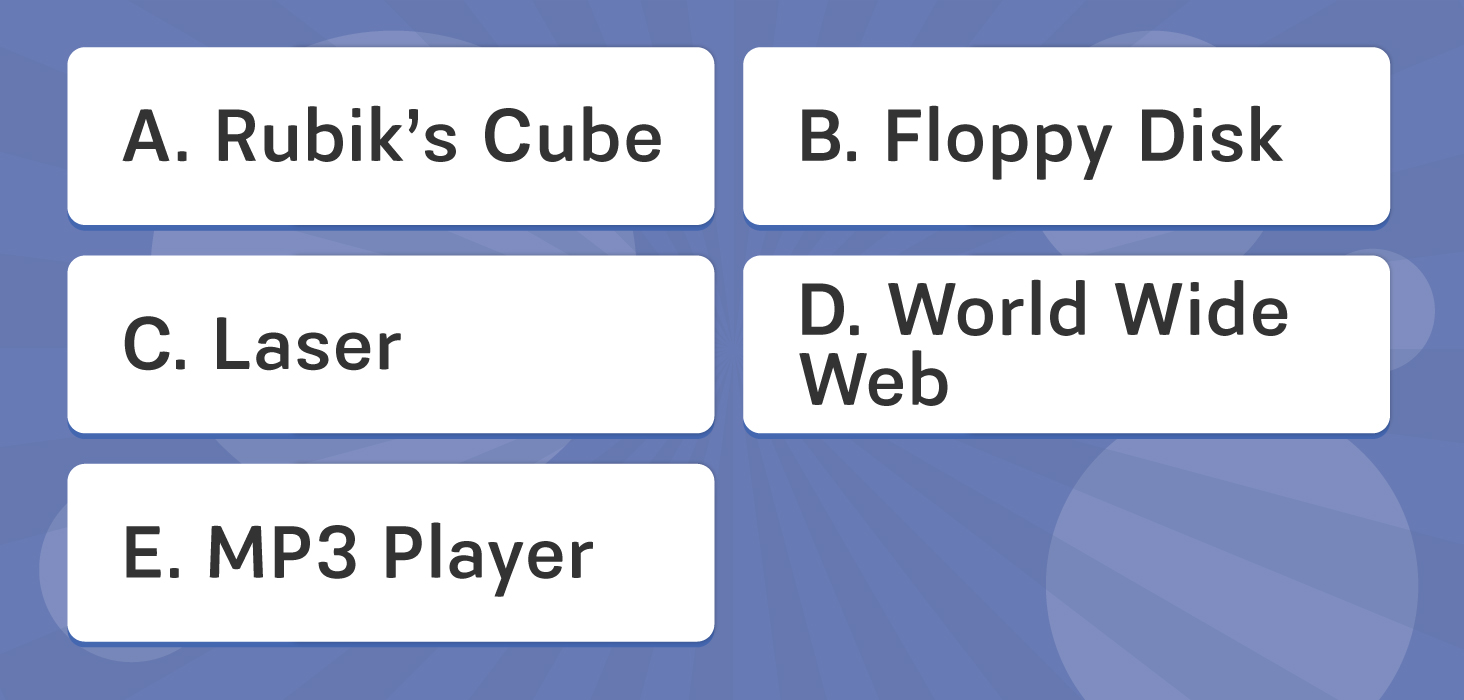
Q Alt 5. Can you put these inventions in the correct order, most recent to oldest?
Option:-
- ECDAB
- DCBAE
- EDCBA
- ACDBE
EDCBA
Q Alt 5-2. Let`s try to put these inventions in the correct order, most recent to oldest!
Option:-
- CDEBA
- EDABC
- ACDBE
- EDACB
EDABC
Q Alt 5-3. Think you can put these inventions in the correct order, most recent to oldest?
Option:-
- DCBAE
- ABDCE
- ABCDE
- ACDBE
ABCDE

Q Alt 6. A piece of literature. How many books below were written by Agatha Christie?
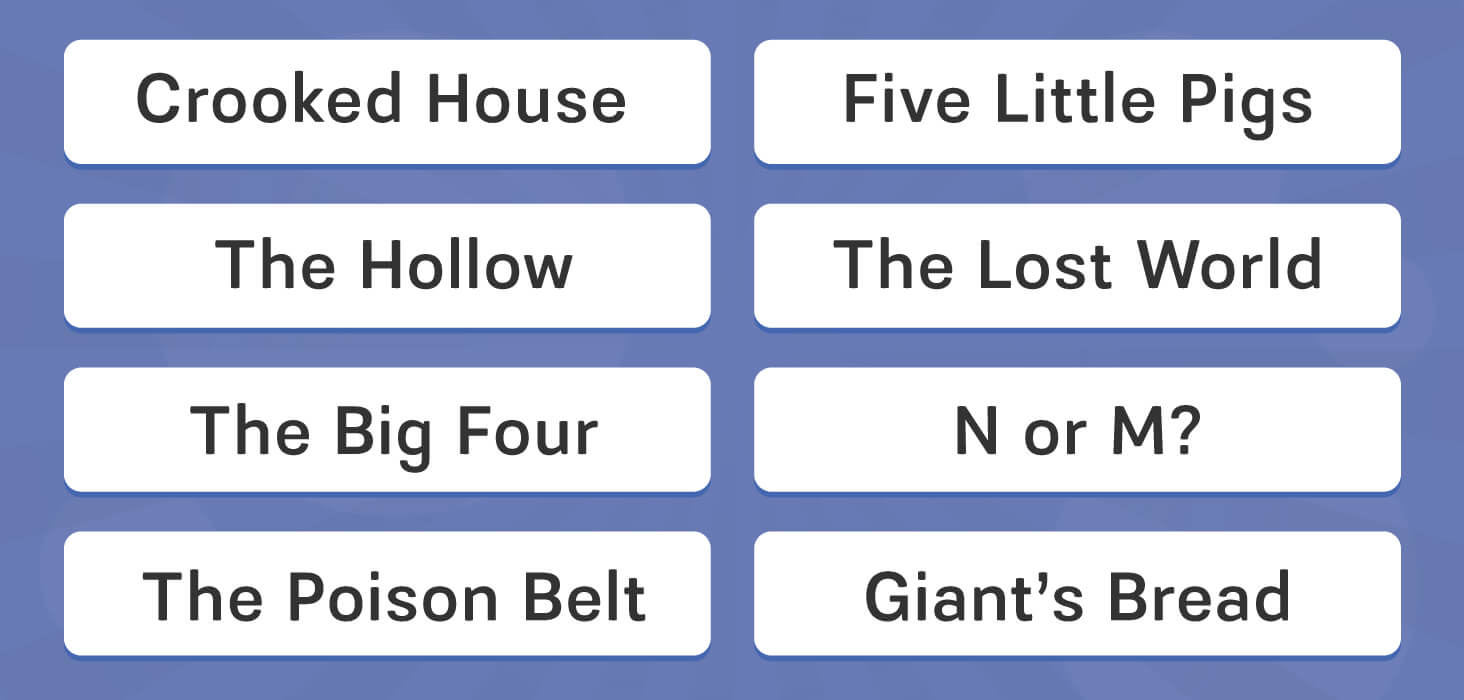
Option:-
- 4
- 5
- 6
- 7
6
Q Alt 6-2. Can you figure out how many books below were written by Agatha Christie?

Option:-
- 4
- 5
- 6
- 7
6
Q Alt 6-3. A touch of mystery. How many books below were written by Agatha Christie?
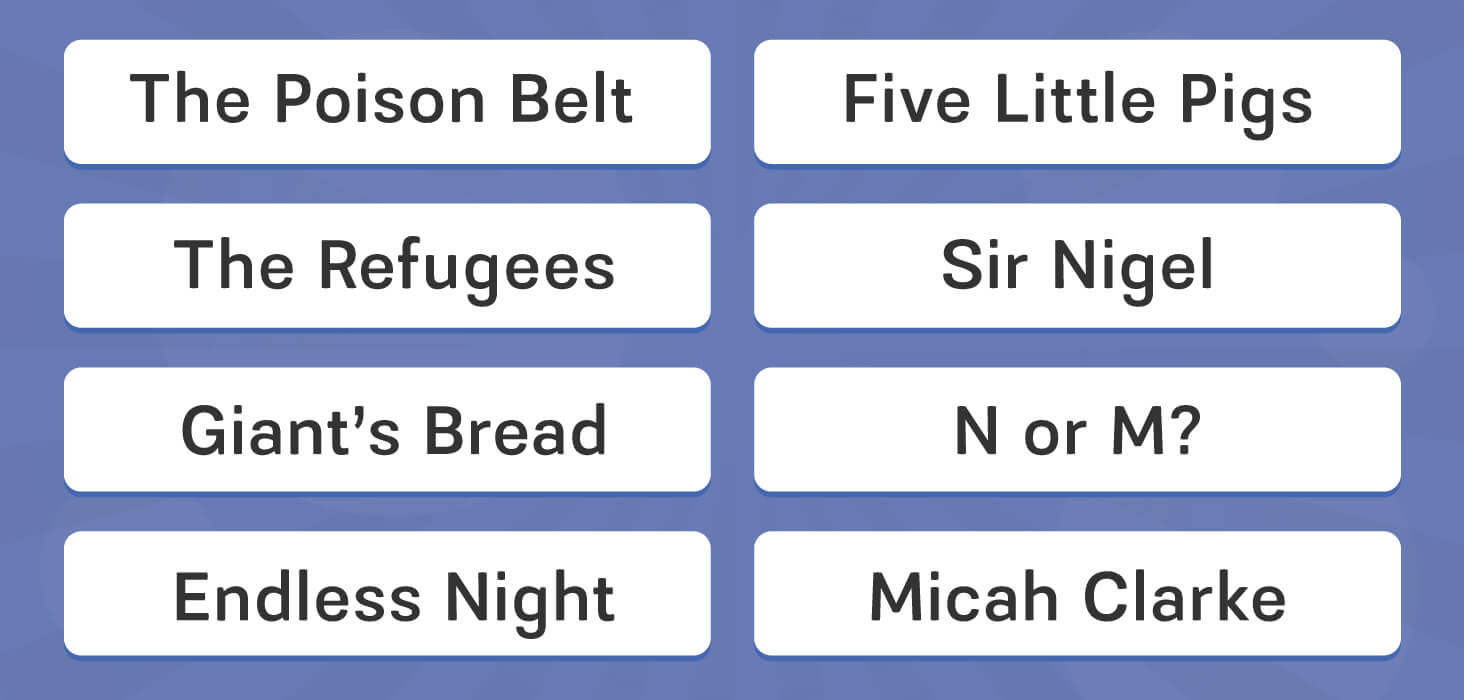
Option:-
- 4
- 5
- 6
- 7
4




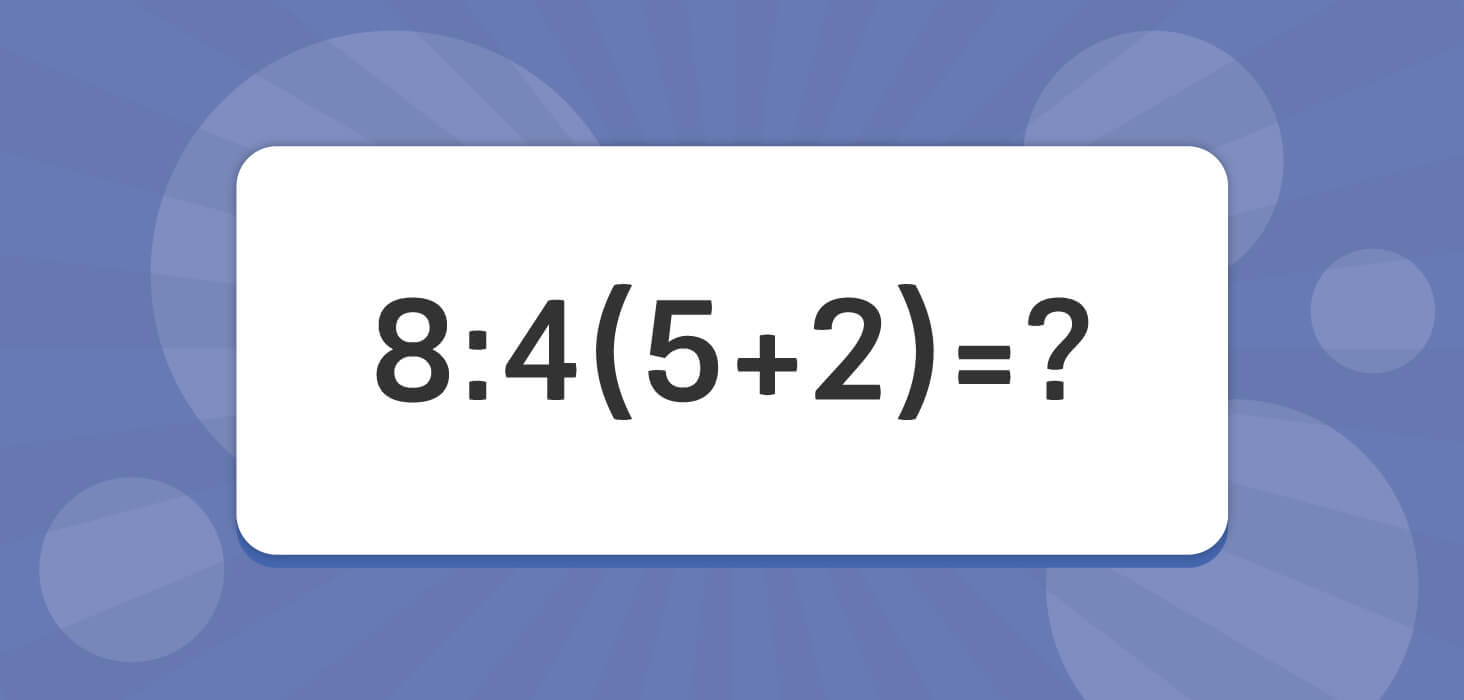
Q 8. Let’s brush up your math! Watch the video below. Can you answer the question?
Option:-
- 5
- 6
- 7
- 12
5

Bro I missed most of the questions y’all did something wrong, bro I need ma credits mane
There could be alternative link for the quiz. Can you check your browser history and provide the quiz link? For the quiz I tried just now it still has all questions and giving 100%.
I did it and I failed you did something wrong
Updated. Try now.
I missed two questions. It doesn’t give you the answers for two of the questions in the quiz. I would help y’all if I knew what they were 💀. I need my Imvu creds dawg.😭
Updated. Try now.
https://videoquizstar.com/pt/play/R24FVI/question/G68XR
Look carefully! Which shadow suits this character perfectly?
Idk the answer…
Find the difference in two images is not same as the mansion lol
The Q8 is different, not is 5 https://gyazo.com/7ecb20e5b4595a5278e4e8c298807511
https://videoquizstar.com/en/play/D6VI2N/answer/WZWGYO?vd=1 I didn’t get my rewards. Says I missed the points I needed. I used all your answers
Thanks for reporting. Updated. Check now.
you probaby didnt pay close enough attention to the ones where there’s multiple versions of the questions
pitomba,fui pelas respostas daqui e perdi no quiz
i have some new photos for “find the differences” and i can’t find them
Same
The image answer is 8
Updated.
Updated. Check now.
I put in each answer that you gave, but it still says I “just missed it”.
Updated. Check now.